
GNSS 오차
GNSS 현황을 확인해보세요.
- 홈
- GNSS 시스템
- GNSS 개요
- GNSS 오차
GNSS의 오차는 위치정확도에 영향을 끼칩니다. 이런 오차는 소거 또는 모델링을 통해서 해당 측위 오차를 최소화하여 GNSS 측위 사용자의 정확도를 향상시킬 수 있습니다.
주요 GNSS 오류 소스 및 RTCM 상태 매개 변수
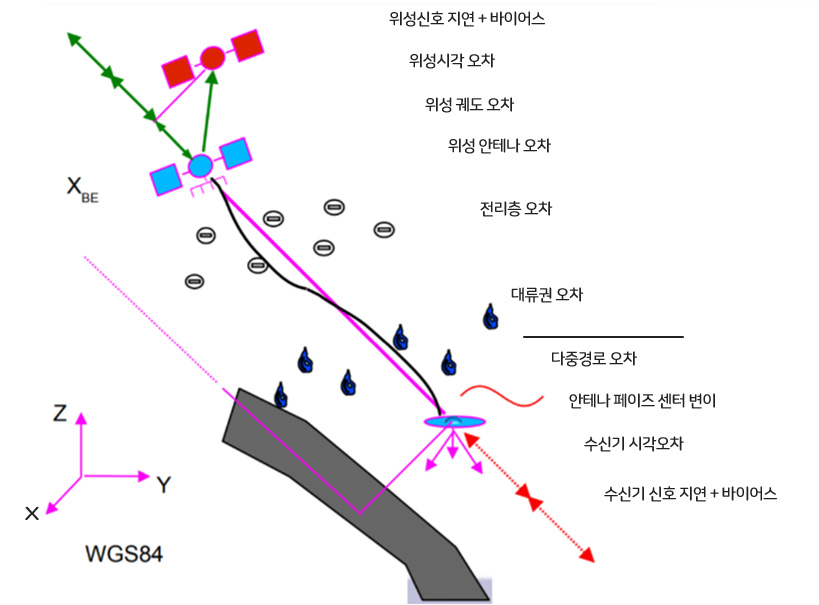 GNSS의 주요 오류소스로는 크게 GNSS 위성오차, 전리층과 대류층 오차, 다중경로 오차, GNSS 수신기에서 오차가 있습니다. GNSS 위성 오차로는 위성신호 지연, 바이어스, 위성시각 오차, 위성 궤도 오차, 위성 안테나 오차가 있습니다. 또한 GNSS 수신기의 오차는 안테나 페이즈 센터 변이, 수신기 시각오차, 수신기 신호 지연, 바이어스 등이 있습니다.
GNSS의 주요 오류소스로는 크게 GNSS 위성오차, 전리층과 대류층 오차, 다중경로 오차, GNSS 수신기에서 오차가 있습니다. GNSS 위성 오차로는 위성신호 지연, 바이어스, 위성시각 오차, 위성 궤도 오차, 위성 안테나 오차가 있습니다. 또한 GNSS 수신기의 오차는 안테나 페이즈 센터 변이, 수신기 시각오차, 수신기 신호 지연, 바이어스 등이 있습니다.
GNSS 위성 오차
GNSS 위성이 가지고 있는 오차는 위성 신호의 지연과 바이어스, 위성 시각 오차, 위성 궤도 오차, 위성 안테나의 위상 변이 등이 있을 수 있습니다.
전리층과 대류층 오차
GNSS 위성에서 생성되어 지구로 향하는 측위 신호는 빛의 속도(300,000 km/s)로 지구에 도달합니다. GNSS 신호가 우주공간을 지나 지상의 GNSS 수신기에 도달하는 경로에는 전리층(Ionospheric Layer)과 대류층 (Tropospheric Layer)가 있고, 전파는 두 층을 통과하면서 신호의 지연이 발생합니다. 전리층에서는 하전된 입자들이 지상으로 향하는 GNSS 신호를 끌어당겨서 굴절시키고 대류층에서는 다른 비율로 물방울들이 같은 역할을 합니다. 이러한 신호의 지연은 GNSS 위성이 낮은 고도에 있을 때, 더욱 심해집니다.
▶ 출처 | 한국천문연구원 홈페이지, 2019년 12월 접속, http://gps.re.kr/outline/outline_17.asp)
다중경로 (Multi Path) 오차
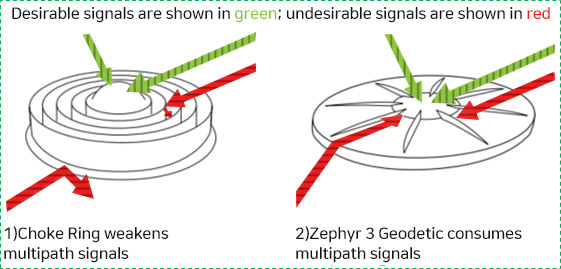
여러 GNSS 위성의 신호가 GNSS 수신기에 도달할 때, 바다, 초원, 광활한 대지 등과 같이 GNSS 수신기 주변에 아무런 장애물 없이 직접 수신하는 것이 가장 좋습니다. 하지만 현실 세계에서는 다양한 인공 구조물이나 나무 등이 있는 환경에서 GNSS 측위를 할 수 밖에 없습니다. 이 때, GNSS 수신기는 주변의 구조물 또는 지장물에 반사된 GNSS 신호를 수신하는데, 신호의 반사로 위성에서 발사된 신호의 경로가 길어지고, 이는 시간의 지연을 발생시킵니다. 이런 시간 지연은 위치오차를 유발하며, 이런 오차를 다중경로 오차라고 합니다. GNSS 수신기에서는, 다중 경로로 들어오는 위성 신호에 대해서 물리적으로 차단하는 방식 (Choke Ring)또는 Phase Center로 가면서 에너지를 감소하는 방식을 사용하여 멀티패스를 최소화하는 기법을 사용합니다.
 GNSS 수신기에서는, 다중 경로로 들어오는 위성 신호에 대해서 물리적으로 차단하는 방식 (Choke Ring)또는 Phase Center로 가면서 에너지를 감소하는 방식을 사용하여 멀티패스를 최소화하는 기법을 사용합니다.
GNSS 수신기에서는, 다중 경로로 들어오는 위성 신호에 대해서 물리적으로 차단하는 방식 (Choke Ring)또는 Phase Center로 가면서 에너지를 감소하는 방식을 사용하여 멀티패스를 최소화하는 기법을 사용합니다.
▶ 이미지 출처 | (Trimble GNSS Geodetic Antenna Brochure)
GNSS 수신기에서의 오차
GNSS 신호는 지상 약 20,000 km 상공의 GNSS 위성에서 발사된 GNSS 신호를 수신하므로, GNSS 수신기에서 수신된 위성신호의 강도는 매우 약합니다. GNSS 수신기에서의 오차는 매우 약한 강도로 수신된 신호와 간섭을 일으켜 수신기 자체에서 발생하는 오차로, 잡음은 각 신호기마다 다르지만 대부분 수신기는 잡음을 최소화하기 위한 내부 필터링 장치를 가지고 있습니다. PRN 코드 잡음과 수신기 잡음이 합쳐져 전체 잡음이 됩니다.
▶ 출처 | 한국천문연구원 홈페이지, 2019년 12월 접속, http://gps.re.kr/outline/outline_17.asp)